






18
May
简明条件随机场CRF介绍(附带纯Keras实现)
By 苏剑林 | 2018-05-18 | 447530位读者 |笔者去年曾写过博文《果壳中的条件随机场(CRF In A Nutshell)》,以一种比较粗糙的方式介绍了一下条件随机场(CRF)模型。然而那篇文章显然有很多不足的地方,比如介绍不够清晰,也不够完整,还没有实现,在这里我们重提这个模型,将相关内容补充完成。
本文是对CRF基本原理的一个简明的介绍。当然,“简明”是相对而言中,要想真的弄清楚CRF,免不了要提及一些公式,如果只关心调用的读者,可以直接移到文末。
图示 #
按照之前的思路,我们依旧来对比一下普通的逐帧softmax和CRF的异同。
逐帧softmax #
CRF主要用于序列标注问题,可以简单理解为是给序列中的每一帧都进行分类,既然是分类,很自然想到将这个序列用CNN或者RNN进行编码后,接一个全连接层用softmax激活,如下图所示
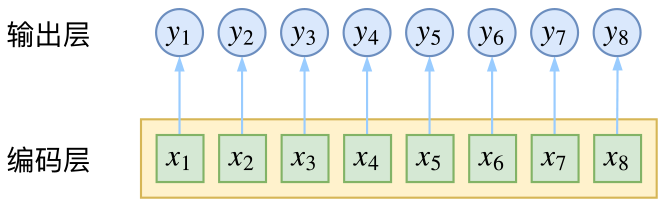
逐帧softmax并没有直接考虑输出的上下文关联
条件随机场 #
然而,当我们设计标签时,比如用s、b、m、e的4个标签来做字标注法的分词,目标输出序列本身会带有一些上下文关联,比如s后面就不能接m和e,等等。逐标签softmax并没有考虑这种输出层面的上下文关联,所以它意味着把这些关联放到了编码层面,希望模型能自己学到这些内容,但有时候会“强模型所难”。
而CRF则更直接一点,它将输出层面的关联分离了出来,这使得模型在学习上更为“从容”:
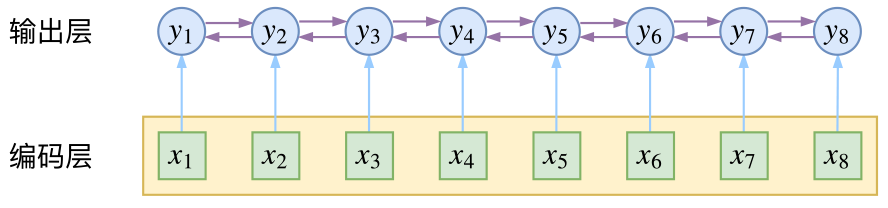
CRF在输出端显式地考虑了上下文关联
数学 #
当然,如果仅仅是引入输出的关联,还不仅仅是CRF的全部,CRF的真正精巧的地方,是它以路径为单位,考虑的是路径的概率。
模型概要 #
假如一个输入有$n$帧,每一帧的标签有$k$种可能性,那么理论上就有$k^n$种不同的输出。我们可以将它用如下的网络图进行简单的可视化。在下图中,每个点代表一个标签的可能性,点之间的连线表示标签之间的关联,而每一种标注结果,都对应着图上的一条完整的路径。
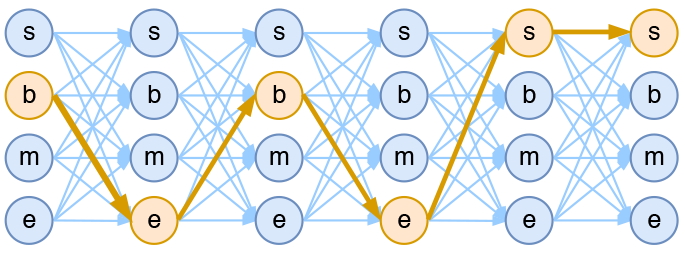
4tag分词模型中输出网络图
而在序列标注任务中,我们的正确答案是一般是唯一的。比如“今天天气不错”,如果对应的分词结果是“今天/天气/不/错”,那么目标输出序列就是bebess,除此之外别的路径都不符合要求。换言之,在序列标注任务中,我们的研究的基本单位应该是路径,我们要做的事情,是从$k^n$条路径选出正确的一条,那就意味着,如果将它视为一个分类问题,那么将是$k^n$类中选一类的分类问题!
这就是逐帧softmax和CRF的根本不同了:前者将序列标注看成是$n$个$k$分类问题,后者将序列标注看成是$1$个$k^n$分类问题。
具体来讲,在CRF的序列标注问题中,我们要计算的是条件概率
$$P(y_1,\dots,y_n|x_1,\dots,x_n)=P(y_1,\dots,y_n|\boldsymbol{x}),\quad \boldsymbol{x}=(x_1,\dots,x_n)\tag{1}$$
为了得到这个概率的估计,CRF做了两个假设:
假设一 该分布是指数族分布。
这个假设意味着存在函数$f(y_1,\dots,y_n;\boldsymbol{x})$,使得
$$P(y_1,\dots,y_n|\boldsymbol{x})=\frac{1}{Z(\boldsymbol{x})}\exp\Big(f(y_1,\dots,y_n;\boldsymbol{x})\Big)\tag{2}$$
其中$Z(\boldsymbol{x})$是归一化因子,因为这个是条件分布,所以归一化因子跟$\boldsymbol{x}$有关。这个$f$函数可以视为一个打分函数,打分函数取指数并归一化后就得到概率分布。
假设二 输出之间的关联仅发生在相邻位置,并且关联是指数加性的。
这个假设意味着$f(y_1,\dots,y_n;\boldsymbol{x})$可以更进一步简化为
$$\begin{aligned}f(y_1,\dots,y_n;\boldsymbol{x})=&h(y_1;\boldsymbol{x})+g(y_1,y_2;\boldsymbol{x})+h(y_2;\boldsymbol{x})+g(y_2,y_3;\boldsymbol{x})+h(y_3;\boldsymbol{x})\\
&+\dots+g(y_{n-1},y_n;\boldsymbol{x})+h(y_n;\boldsymbol{x})\end{aligned}\tag{3}$$
这也就是说,现在我们只需要对每一个标签和每一个相邻标签对分别打分,然后将所有打分结果求和得到总分。
线性链CRF #
尽管已经做了大量简化,但一般来说,$(3)$式所表示的概率模型还是过于复杂,难以求解。于是考虑到当前深度学习模型中,RNN或者层叠CNN等模型已经能够比较充分捕捉各个$y$与输入$\boldsymbol{x}$的联系,因此,我们不妨考虑函数$g$跟$\boldsymbol{x}$无关,那么
$$\begin{aligned}f(y_1,\dots,y_n;\boldsymbol{x})=h(y_1;\boldsymbol{x})+&g(y_1,y_2)+h(y_2;\boldsymbol{x})+\dots\\
+&g(y_{n-1},y_n)+h(y_n;\boldsymbol{x})\end{aligned}\tag{4}$$
这时候$g$实际上就是一个有限的、待训练的参数矩阵而已,而单标签的打分函数$h(y_i;\boldsymbol{x})$我们可以通过RNN或者CNN来建模。因此,该模型是可以建立的,其中概率分布变为
$$P(y_1,\dots,y_n|\boldsymbol{x})=\frac{1}{Z(\boldsymbol{x})}\exp\left(h(y_1;\boldsymbol{x})+\sum_{t=1}^{n-1}\Big[g(y_t,y_{t+1})+h(y_{t+1};\boldsymbol{x})\Big]\right)\tag{5}$$
这就是线性链CRF的概念。
归一化因子 #
为了训练CRF模型,我们用最大似然方法,也就是用
$$-\log P(y_1,\dots,y_n|\boldsymbol{x})\tag{6}$$
作为损失函数,可以算出它等于
$$-\left(h(y_1;\boldsymbol{x})+\sum_{t=1}^{n-1}\Big[g(y_t,y_{t+1})+h(y_{t+1};\boldsymbol{x})\Big]\right)+\log Z(\boldsymbol{x})\tag{7}$$
其中第一项是原来概率式的分子的对数,它目标的序列的打分,虽然它看上去挺迂回的,但是并不难计算。真正的难度在于分母的对数$\log Z(\boldsymbol{x})$这一项。
归一化因子,在物理上也叫配分函数,在这里它需要我们对所有可能的路径的打分进行指数求和,而我们前面已经说到,这样的路径数是指数量级的($k^n$),因此直接来算几乎是不可能的。
事实上,归一化因子难算,几乎是所有概率图模型的公共难题。幸运的是,在CRF模型中,由于我们只考虑了临近标签的联系(马尔可夫假设),因此我们可以递归地算出归一化因子,这使得原来是指数级的计算量降低为线性级别。具体来说,我们将计算到时刻$t$的归一化因子记为$Z_t$,并将它分为$k$个部分
$$Z_t = Z^{(1)}_t + Z^{(2)}_t + \dots + Z^{(k)}_t\tag{8}$$
其中$Z^{(1)}_t,\dots,Z^{(k)}_t$分别是截止到当前时刻$t$中、以标签$1,\dots,k$为终点的所有路径的得分指数和。那么,我们可以递归地计算
$$\begin{aligned}Z^{(1)}_{t+1} = &\Big(Z^{(1)}_t G_{11} + Z^{(2)}_t G_{21} + \dots + Z^{(k)}_t G_{k1} \Big) H_{t+1}(1|\boldsymbol{x})\\
Z^{(2)}_{t+1} = &\Big(Z^{(1)}_t G_{12} + Z^{(2)}_t G_{22} + \dots + Z^{(k)}_t G_{k2} \Big) H_{t+1}(2|\boldsymbol{x})\\
&\qquad\qquad\vdots\\
Z^{(k)}_{t+1} =& \Big(Z^{(1)}_t G_{1k} + Z^{(2)}_t G_{2k} + \dots + Z^{(k)}_t G_{kk} \Big) H_{t+1}(k|\boldsymbol{x})
\end{aligned}\tag{9}$$
它可以简单写为矩阵形式
$$\boldsymbol{Z}_{t+1} = \boldsymbol{Z}_{t} \boldsymbol{G}\otimes H(y_{t+1}|\boldsymbol{x})\tag{10}$$
其中$\boldsymbol{Z}_{t}=\Big[Z^{(1)}_t,\dots,Z^{(k)}_t\Big]$;而$\boldsymbol{G}$是对矩阵$g$各个元素取指数后的矩阵(前面已经说过,最简单的情况下,$g$只是一个矩阵,代表某个标签到另一个标签的分数),即$\boldsymbol{G}_{ij}=e^{g_{ij}}$;而$H(y_{t+1}|\boldsymbol{x})$是编码模型$h(y_{t+1}|\boldsymbol{x})$(RNN、CNN等)对位置$t+1$的各个标签的打分的指数,即$H(y_{t+1}|\boldsymbol{x})=e^{h(y_{t+1}|\boldsymbol{x})}$,也是一个向量。式$(10)$中,$\boldsymbol{Z}_{t} \boldsymbol{G}$这一步是矩阵乘法,得到一个向量,而$\otimes$是两个向量的逐位对应相乘。
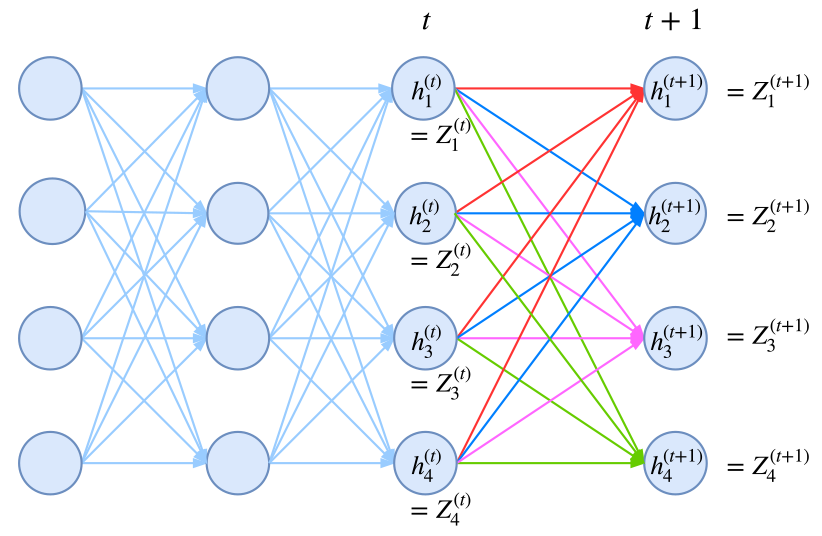
归一化因子的递归计算图示。从t到t+1时刻的计算,包括转移概率和j+1节点本身的概率
如果不熟悉的读者,可能一下子比较难接受$(10)$式。读者可以把$n=1,n=2,n=3$时的归一化因子写出来,试着找它们的递归关系,慢慢地就可以理解$(10)$式了。
动态规划 #
写出损失函数$-\log P(y_1,\dots,y_n|\boldsymbol{x})$后,就可以完成模型的训练了,因为目前的深度学习框架都已经带有自动求导的功能,只要我们能写出可导的loss,就可以帮我们完成优化过程了。
那么剩下的最后一步,就是模型训练完成后,如何根据输入找出最优路径来。跟前面一样,这也是一个从$k^n$条路径中选最优的问题,而同样地,因为马尔可夫假设的存在,它可以转化为一个动态规划问题,用viterbi算法解决,计算量正比于$n$。
动态规划在本博客已经出现了多次了,它的递归思想就是:一条最优路径切成两段,那么每一段都是一条(局部)最优路径。在本博客右端的搜索框键入“动态规划”,就可以得到很多相关介绍了,所以不再重复了~
实现 #
经过调试,基于Keras框架下,笔者得到了一个线性链CRF的简明实现,这也许是最简短的CRF实现了。这里分享最终的实现并介绍实现要点。
实现要点 #
前面我们已经说明了,实现CRF的困难之处是$-\log P(y_1,\dots,y_n|\boldsymbol{x})$的计算,而本质困难是归一化因子部分$Z(\boldsymbol{x})$的计算,得益于马尔科夫假设,我们得到了递归的$(9)$式或$(10)$式,它们应该已经是一般情况下计算$Z(\boldsymbol{x})$的计算了。
那么怎么在深度学习框架中实现这种递归计算呢?要注意,从计算图的视角看,这是通过递归的方法定义一个图,而且这个图的长度还不固定。这对于pytorch这样的动态图框架应该是不为难的,但是对于tensorflow或者基于tensorflow的Keras就很难操作了(它们是静态图框架)。
不过,并非没有可能,我们可以用封装好的rnn函数来计算!我们知道,rnn本质上就是在递归计算
$$\boldsymbol{h}_{t+1} = f(\boldsymbol{x}_{t+1}, \boldsymbol{h}_{t})\tag{11}$$
新版本的tensorflow和Keras都已经允许我们自定义rnn细胞,这就意味着函数$f$可以自行定义,而后端自动帮我们完成递归计算。于是我们只需要设计一个rnn,使得我们要计算的$\boldsymbol{Z}$对应于rnn的隐藏向量!
这就是CRF实现中最精致的部分了。
至于剩下的,是一些细节性的,包括:
1、为了防止溢出,我们通常要取对数,但由于归一化因子是指数求和,所以实际上是$\log\left(\sum_{i=1}^k e^{a_i}\right)$这样的格式,它的计算技巧是:
$$\log\left(\sum_{i=1}^k e^{a_i}\right)=A + \log\left(\sum_{i=1}^k e^{a_i-A}\right),\quad A = \max \{a_1,\dots,a_k\}$$
tensorflow和Keras中都已经封装好了对应的logsumexp函数了,直接调用即可;2、对于分子(也就是目标序列的得分)的计算技巧,在代码中已经做了注释,主要是通过用“目标序列”点乘“预测序列”来实现取出目标得分;
3、关于变长输入的padding部分如何进行mask?我觉得在这方面Keras做得并不是很好。为了简单实现这种mask,我的做法是引入多一个标签,比如原来是s、b、m、e四个标签做分词,然后引入第五个标签,比如x,将padding部分的标签都设为x,然后可以直接在CRF损失计算时忽略第五个标签的存在,具体实现请看代码。
代码速览 #
纯Keras实现的CRF层,欢迎使用~
# -*- coding:utf-8 -*-
from keras.layers import Layer
import keras.backend as K
class CRF(Layer):
"""纯Keras实现CRF层
CRF层本质上是一个带训练参数的loss计算层,因此CRF层只用来训练模型,
而预测则需要另外建立模型。
"""
def __init__(self, ignore_last_label=False, **kwargs):
"""ignore_last_label:定义要不要忽略最后一个标签,起到mask的效果
"""
self.ignore_last_label = 1 if ignore_last_label else 0
super(CRF, self).__init__(**kwargs)
def build(self, input_shape):
self.num_labels = input_shape[-1] - self.ignore_last_label
self.trans = self.add_weight(name='crf_trans',
shape=(self.num_labels, self.num_labels),
initializer='glorot_uniform',
trainable=True)
def log_norm_step(self, inputs, states):
"""递归计算归一化因子
要点:1、递归计算;2、用logsumexp避免溢出。
技巧:通过expand_dims来对齐张量。
"""
inputs, mask = inputs[:, :-1], inputs[:, -1:]
states = K.expand_dims(states[0], 2) # (batch_size, output_dim, 1)
trans = K.expand_dims(self.trans, 0) # (1, output_dim, output_dim)
outputs = K.logsumexp(states + trans, 1) # (batch_size, output_dim)
outputs = outputs + inputs
outputs = mask * outputs + (1 - mask) * states[:, :, 0]
return outputs, [outputs]
def path_score(self, inputs, labels):
"""计算目标路径的相对概率(还没有归一化)
要点:逐标签得分,加上转移概率得分。
技巧:用“预测”点乘“目标”的方法抽取出目标路径的得分。
"""
point_score = K.sum(K.sum(inputs * labels, 2), 1, keepdims=True) # 逐标签得分
labels1 = K.expand_dims(labels[:, :-1], 3)
labels2 = K.expand_dims(labels[:, 1:], 2)
labels = labels1 * labels2 # 两个错位labels,负责从转移矩阵中抽取目标转移得分
trans = K.expand_dims(K.expand_dims(self.trans, 0), 0)
trans_score = K.sum(K.sum(trans * labels, [2, 3]), 1, keepdims=True)
return point_score + trans_score # 两部分得分之和
def call(self, inputs): # CRF本身不改变输出,它只是一个loss
return inputs
def loss(self, y_true, y_pred): # 目标y_pred需要是one hot形式
if self.ignore_last_label:
mask = 1 - y_true[:, :, -1:]
else:
mask = K.ones_like(y_pred[:, :, :1])
y_true, y_pred = y_true[:, :, :self.num_labels], y_pred[:, :, :self.num_labels]
path_score = self.path_score(y_pred, y_true) # 计算分子(对数)
init_states = [y_pred[:, 0]] # 初始状态
y_pred = K.concatenate([y_pred, mask])
log_norm, _, _ = K.rnn(self.log_norm_step, y_pred[:, 1:], init_states) # 计算Z向量(对数)
log_norm = K.logsumexp(log_norm, 1, keepdims=True) # 计算Z(对数)
return log_norm - path_score # 即log(分子/分母)
def accuracy(self, y_true, y_pred): # 训练过程中显示逐帧准确率的函数,排除了mask的影响
mask = 1 - y_true[:, :, -1] if self.ignore_last_label else None
y_true, y_pred = y_true[:, :, :self.num_labels], y_pred[:, :, :self.num_labels]
isequal = K.equal(K.argmax(y_true, 2), K.argmax(y_pred, 2))
isequal = K.cast(isequal, 'float32')
if mask == None:
return K.mean(isequal)
else:
return K.sum(isequal * mask) / K.sum(mask)
除去注释和accuracy的代码,真正的CRF的代码量也就30行左右,可以说跟哪个框架比较都称得上是简明的CRF实现了吧~
用纯Keras实现一些复杂的模型,是一件颇有意思的事情。目前仅在tensorflow后端测试通过,理论上兼容theano、cntk后端,但可能要自行微调。
使用案例 #
我的Github中还附带了一个使用CNN+CRF实现的中文分词的例子,用的是Bakeoff 2005语料,例子是一个完整的分词实现,包括viterbi算法、分词输出等。
Github地址:https://github.com/bojone/crf/
相关的内容还可以看我之前的文章:
结语 #
终于介绍完了,希望大家有所收获,也希望最后的实现能对大家有所帮助~
转载到请包括本文地址:https://www.kexue.fm/archives/5542
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (May. 18, 2018). 《简明条件随机场CRF介绍(附带纯Keras实现) 》[Blog post]. Retrieved from https://www.kexue.fm/archives/5542
@online{kexuefm-5542,
title={简明条件随机场CRF介绍(附带纯Keras实现)},
author={苏剑林},
year={2018},
month={May},
url={\url{https://www.kexue.fm/archives/5542}},
}

July 17th, 2020
有个问题请教下笔者, 在利用K.rnn计算配分函数Z时, 是否也会存在梯度消失的问题? 参数矩阵G是否会更多的依赖序列末端的类别转移信息?
任何RNN都可能会梯度消失或者爆炸,但$Z$不涉及到标签,理论上每个位置都是平权的,依赖性方面不大可能有所偏颇。
仔细看了下(10)式, 描述的是指数的乘法, 真正计算时是计算log(Z), 自然也就转换成了加法, K.rnn去递归加法就没有梯度偏颇的问题了, 疏忽了[捂脸哭], 谢谢回复
November 21st, 2020
苏神,请教一个问题,这里outputs = outputs + inputs,inputs在加outputs之前为什么不取一次对数
抱歉,问了个弱智的问题
January 28th, 2021
好像(9)式子写错了,应该是Ht+1(yk|x)
没有错,是$H(y_{t+1}|\boldsymbol{x})$,$y_{t+1}$遍历$1,2,3,\cdots,k$。
May 16th, 2021
本文 $k$ 表示labels类别,第5式序列求和下标改为$t$ 是否更好?上下文一致方便理解
$${\sum_{t=1}^{n-1}}[g(y_t,y_{t+1})+h(y_{t+1};x)]$$
如果能在文章开头说明各符号意义及表达式规则,读起来会更顺畅,当然作者的写作风格已是相当严谨了
感谢作者
嗯嗯,谢谢你的建议,这个建议是对的,已经修改。
August 15th, 2021
苏神,关于配分函数的计算我有点疑问:
在CRF的损失计算path_score是累加一条路径命中的g(y_t,y_{t+1})+h(y_{t+1};x)
而配分函数Z_{t+1}=Z_tGXH(y_t+1|x)则是乘了exp[g(y_t,y_{t+1})]累加后再取log,也就是文中的logsumexp,这里为什么没有像上面计算path_score一样,将经过一点的所有路径score相加?粗糙的公式类似 Z_{t+1}=Z_t+G+H(y_{t+1}|x)
“如果不熟悉的读者,可能一下子比较难接受$(10)$式。读者可以把$n=1,n=2,n=3$时的归一化因子写出来,试着找它们的递归关系,慢慢地就可以理解$(10)$式了。”
这步做了么?
August 17th, 2021
谢谢苏神指点,推导一下后理解了,困扰了很久~
January 27th, 2022
outputs = mask * outputs + (1 - mask) * states[:, :, 0]
请问这里是什么意思?
September 15th, 2022
太感谢苏博士讲解了,看了很多资料,这一个是最清晰透彻深入的。终于看懂了
October 9th, 2022
[...]CRF是做序列标注的经典方法,它理论优雅,实际也很有效,如果还不了解CRF的读者欢迎阅读旧作《简明条件随机场CRF介绍(附带纯Keras实现)》。在BERT模型出来之后,也有不少工作探索了BERT+CRF用于序列标注任务的做法。然而,很多实验结果显示(比如论文《BERT Meets Chinese Word Segmentation》)不管是中文分词还是实体识别任务,相比于简单的BERT+Soft[...]
December 21st, 2022
[...]CRF是做序列标注的经典方法,它理论优雅,实际也很有效,如果还不了解CRF的读者欢迎阅读旧作《简明条件随机场CRF介绍(附带纯Keras实现)》。在BERT模型出来之后,也有不少工作探索了BERT+CRF用于序列标注任务的做法。然而,很多实验结果显示(比如论文《BERT Meets Chinese Word Segmentation》)不管是中文分词还是实体识别任务,相比于简单的BERT+Soft[...]